:: به بخش سوم خوش اومدین ::
تا اینجا درباره سیستم تعلیق گفتیم و چند تا از عکسهاش رو هم دیدیم. حالا وقتشه که بریم سراغ موتور و سیستم انتقال قدرت ربات.
به طور کلی، مجموعه سیستم انتقال قدرت ربات شامل چند تا بخشه. موتورها (Motor)، گیربکس (Gearbox)، شفت و کوپلر (Shaft & Coupler)، چرخدندهها و تسمهها (Gears & Belts)، کنترلر موتور (Motor Driver) و سیستم تعلیق و اتصال به چرخها.
موتورها
وقتی دارین ربات میسازین، اون وقتی که به قسمت موتور میرسین، بخش مهمی از ساختن رباتتون شروع میشه. اولین کار، گوگل کردن جمله ” انواع موتور ربات ” هست. این کار برای شروع خوبه ولی همون اول شما رو وارد دنیای عجیب و غریب موتورهای مختلف قابل استفاده تو صنعت رباتیک، با اسمهایی که ممکنه تابحال چیزی ازشون نشنیده باشین میکنه. برای همین تو این قسمت از وبسایت روبوایکو، طبق روال بخش های قبلی، خیلی ساده، خلاصه، بدون اضافه گفتن و استفاده از کلمات تخصصی، میریم برای یاد گرفتن انواع موتورها برای استفاده تو رباتی که میخوایم بسازیمش.
انواع موتور های مناسب ربات
موتور DC یا Direct Current Motor :
اولین موتوری که تو دنیای رباتیک زیاد استفاده میشه، موتور DC هست. همونطور که از اسمش پیداست، این موتور با جریان مستقیم کار میکنه و با مصرف انرژی الکتریکی، انرژی مکانیکی تولید میکنه. این موتور از 4 بخش روتور (یا آرمیچر که همون بخش چرخان موتور هست)، استاتور ( که بخش ثابت موتوره و شامل آهنربا و سیم پیچه)، جاروبک ( یا براش که جریان رو از کموتاتور به روتور میرسونه) و کموتاتور (که برای حفظ چرخش یکنواخت جهت جریان رو تغییر میده) تشکیل شده. این موتور با استفاده از قابلیت PWM (که با استفاده از میکرو کنترلر یا پلتفرمهایی مثل آردوینو برنامهنویسی میشن) راحت کنترل میشه، قیمت مناسبی داره و به راحتی در دسترسه و کاملاً برای پروژههای رباتیک، مخصوصاً تو پروتوتایپها مناسبه. در کنار این مزایا، استهلاک بیشتر جاروبکها در طول زمان نسبت به نمونههای براشلس و تولید نویز از ایرادات این نوع موتورها هست. این نوع موتورها تو ربات های مسیریاب، ماشین های کنترلی، و رباتهایی که حرکت میکنن اما ساده هستن، بیشتر استفاده میشه.(تصویر سمت راست)
موتور BDC یا Brushless DC Motor :
این نوع موتورها هم چون که از خانوادهای مشترک با موتور های DC هستن، تا حدود زیادی دارای ویژگی مشترک هستن اما مزایای این نوع موتورها نسبت به نوع جاروبکدار یا نوع دارای براش بیشتره. تو نمونههای براشلس، چون چیزی به عنوان جاروبک وجود نداره بنابراین عمر موتور بیشتره و راندمان(با مصرف کمتر انرژی، قدرت بشتری رو میده) بشتری هم داره. اما در مقابل نیاز به یه درایور پیچیده تر هم داره که این یعنی هم قیمت موتور و هم قیمت درایور کمی بیشتر از نمونه براش دار هست. این نوع موتور به خاطر کیفیت بالاترش تو رباتهای پیشرفته تر، پهپادها یا همون درونها و تو وسایل نقلیه الکتریکی (البته نمونه های بزرگتر و پیشرفته تر) استفاده میشه.
اصلاً موتور DC مناسب ربات من هست؟!
این موتور ها قابل کنترل با برنامه نویسی هستن یعنی میشه سرعتشون رو کنترل کرد (با استفاده از قابلیت PWM). از طرف دیگه قابلیت این رو دارن که تو هر مرحله از استفاده، بتونیم جهت جریانشون رو عوض کنیم (با استفاده از مدار H-Bridge). این موتورها دقت قابل قبولی دارن ولی اگه نیاز به دقت بالاتری داشته باشین، حتماً باید از انکودر(سیستم تشخیص موقعیت، جهت و حرکت شفت موتور) یا سنسور موقعیت تو مسیر این موتورها استفاده کنین. ولتاژ کاری این نوع موتورها بین 3 ولت تا 24 ولت (بسته به ویژگیهای پروژه و منبع تغذیه) هست. یادتون باشه اگه میخواین از این موتورها تو رباتتون استفاده کنین حتماً جریان مصرفی اون رو با توان باتری و درایور موتور هماهنگ کنین. تو رباتهای سنگین از نمونههای با گشتاور بالا (Torque) استفاده کنین. برای رباتهایی که قراره سرعت بالا داشته باشن از نوعی استفاده کنین که RPM بالاتری داره و نهایتاً حواستون باشه که تو شاسی رباتتون فضای کافی برای این نوع موتورها (مخصوصاً اگه از چندتا موتور استفاده میکنین) و وزنشون رو هم در نظر بگیرین.
موتور سروو یا Servo Motor :
سروو موتور مثل موتور DC یه موتور الکتریکیه که انرژی الکتریکی منبع تغذیه (که تو بیشتر رباتها باتری هست) رو به انرژی مکانیکی مورد نیاز برای حرکت چرخها تبدیل میکنه.استفاده از سروو موتور قابلیت های زیادی به رباتی که میخوایم بسازیم میده، چون که از این موتور میشه برای کنترل دقیق موقعیت زاویهای، سرعت و شتاب استفاده کرد. صنایع زیادی هستن که از این نوع موتورها تو کار خودشون استفاده میکنن. مثل رباتیک (برای حرکت دقیق مفصلهای ربات)، هواپیماهای مدل ( برای کنترل سطوح پروازی مثل بالچهها)، دوربینهای امنیتی (برای چرخش دقیق لنز)، دستگاههای CNC (برای کنترل دقیق ابزار برش)، اتوماسیون صنعتی (که همون استفاده از دستگاه های اتوماتیک با قابلیت کنترل با نرمافزارهای مختلفه)، هوافضا و خیلی جاهای دیگه. سروو موتور از یه سنسور موقعیت (مثل انکودر)، یه مدار کنترل (برای مقایسه موقعیت فعلی با موقعیت مطلوب و تنظیم جریان موتور) و گیربکس، برای زیاد کردن گشتاور و کم کردن سرعت تشکیل شده. این موتور در مقابل موتورDC، کنترل موقعیت دقیقتری داره، سریعتر به مدار کنترلش پاسخ میده و مصرف انرژی بهینه تری داره.(تصویر سمت چپ)


چه نوع سروو موتوری مناسب ربات منه؟!
سروو موتور مثل بقیه موتورها انواع مختلفی داره. اگه رباتتون ثابته یعنی حرکت نمیکنه و یا ربات رو برای کاری استفاده میکنین که نیاز به دقت بالایی داره، بهتره از سروو موتور AC استفاده کنین. همونطور که از اسمش پیداست، این نوع از سروو موتور از برق متناوب استفاده میکنه. این موتور سرعت و دقت بالایی داره برای همین مناسب کارهای دقیق و سنگینه. بیشتر رباتهای صنعتی که توی کارخونهها و تحت سیستم اتوماسیون صنعتی کنترل میشن، از این نوع موتور استفاده میکنن. نوع بعدی، سروو موتور DC هست. این نوع موتور بیشتر تو رباتهای متحرک مثل انواع ماشینهای خدمات رسان قابل کنترل، نمونههایی از خودروهای خودران، پهپادها و به طورکلی هرچیزی که متحرکه و منبع تغذیهای به نام باتری داره استفاده میشه. چون که این نوع سروو موتور راحت تر قابل کنترله، تو رباتهای آموزشی هم میشه ازش استفاده کرد. نمونه بعدی سروو موتور خطی یا Linear Servo Motor هست. این نوع سروو موتور به جای حرکت چرخشی، حرکت خطی داره. این نوع موتور به دلیل دقت بالایی که داره بیشتر تو ماشینآلات دقیق، پرینترهای صنعتی و تجهیزات پزشکی استفاده میشه. در نهایت هم سروو موتورهای دیجیتال و آنالوگ رو داریم. سروو موتور دیجیتال دقت و سرعت بالاتری نسبت به نوع آنالوگ داره و هم راحتتر برنامهریزی میشه. به همین دلیل تو پروژههای رباتیک پیشرفته و همچنین تو هواپیماهای مدل پیشرفته استفاده میشه. در مقابل سروو موتور آنالوگ سادهتر و ارزونتر از نوع دیجیتاله و برای پروژههای ابتدایی و آموزشی مناسب تره.
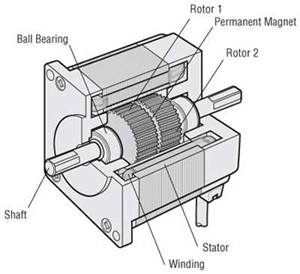
استپر موتور یا Stepper Motor :
استپر موتور که بهش موتور پلهای هم میگن، یه نوع موتور الکتریکیه تقریباً مثل موتورهایی که تا الان دربارشون صحبت کردیم. ولی یه تفاوت بزرگ داره که این نوع موتور رو از بقیه موتورها متمایز میکنه. استپر موتور به صورت گام به گام حرکت میکنه یعنی برخلاف موتور های DC و سروو که حرکت چرخشی یا دورانی داشتن، این نوع موتور تو هرلحظه فقط به اندازه یه زاویه مشخص میچرخه. تو این موتور به جای یه دسته سیم پیچ، از چند گروه سیم پیچ استفاده شده. وقتی جریان الکتریکی به هر کدوم از این گروه ها وارد میشه ، روتور این موتور به اندازه یه گام حرکت میکنه. کنترل این حرکت توسط یه میکروکنترلر یا PLC (کامپیوتر صنعتی برنامه پذیر) انجام میشه. این ویژگیها باعث شده که از استپرموتور برای کنترل دقیق موقعیت و سرعت استفاده بشه. استپر موتور از یه استاتور (بخش مربوط به گروهها یا فاز های سیم پیچها)، یه روتور (که همون بخش متحرک موتوره) و بلبرینگ (که تو دو طرف موتور گذاشته میشه تا اصطکاک کاهش پیدا کنه و عمر موتور کم نشه) تشکیل شده. این نوع موتور به خاطر ویژگیهای مثبتی که داره تو صنایع رباتیک، ماشینهای دقیق مثل CNC، پرینترهای سه بعدی و تجهیزات پزشکی استفاده میشه. از جمله نمونههای استپرموتور میشه به استپرموتور رلوکتانس متغیر (Variable Reluctance) که سادهترین نوع استپرموتور هست، استپرموتور با آهنربای دائمی (Permanent Magnet) که از نوع قبلی دقیقتره و گشتاور بیشتری داره، استپرموتور هیبریدی (Hybrid Stepper Motor) که ترکیب دو نوع قبلیه و زاویه گام کوچیک (حدود 1.8 درجه) داره و تو رباتیک بسیار استفاده میشه، استپرموتور خطی (Linear Stepper Motor) که حرکتش خطیه و تو دستگاه های CNC و پرینتر سه بعدی پرکابرده و نهایتاً استپرموتور با گیربکس که با کمک گیربکس داخلی گشتاور زباد و سرعت کم رو بهمون میده که باعث میشه کنترل دقیقی روی ربات مخصوصاً زمانی که وزن سنگینی رو تحمل میکنه داشته باشیم.
کدوم نوع استپر موتور رو برای رباتم انتخاب کنم؟!
اول از همه باید بدونین که رباتتون نیاز به یه موتور چرخشی داره یا موتور پلهای. اگه انتخابتون استپرموتور بود حتماً به این نکات توجه کنین. بین استپرموتورها نوع هیبریدی و نوع 5 فاز زاویه گام کوچیکتری دارن و این یعنی که میتونن دقت بالاتری بهتون بدن. پس در مواردی که نیاز به دقت بالا دارین از این دو نوع استفاده کنین. هرچقدر که تعداد فاز یه استپرموتور بیشتر باشه لرزش کمتری داره در نتیجه راحت تر قابل کنترله بنابراین تو این حالت مدل های 5 فاز و سه فاز از همه بهتر هستن. اگه گشتاور زیادتر میخواین حتماً از دو نوع 5 فاز و هیبریدی استفاده کنین اما اگه سرعت از گشتاور براتون مهمتره پس بهتره انواع 5 فاز و سه فاز رو تو رباتتون به کار ببرین.