:: به بخش دوم خوش اومدین ::
سیستم تعلیق (Suspension System) درواقع شامل همون بخشهایی میشه که چرخ رو به بدنه ربات وصل میکنه و تنها وظیفش جذب تکون خوردنهای ناشی از ناهمواریهای زمینه. سیستم تعلیق خودش بخشهای مختلفی داره که پایینتر درباره اون یاد میگیریم. نکته مهمی که وجود داره اینه که، ممکنه ربات شما به سیستم تعلیق نیاز نداشته باشه. نیاز داشتن یا نیاز نداشتن ربات شما به سیستم تعلیق، بستگی به جایی که کار میکنه و کاری که انجام میده داره. مثلاً اگه ربات شما یه خودروی خودران یا ربات کنترل از راه دوری هست که تو جاده حرکت میکنه و سرنشین یا بار رو جابجا میکنه، قطعاً نیاز به یه سیستم تعلیق متناسب با وزن قابل تحملش داره. ولی اگه ربات شما توی یه کارخونه که سطحش صافه یا به طور کلی وسیلهای هست که نیاز به تحمل وزن نداره، بنابراین نیازی هم به سیستم تعلیق نداره.
قسمت های سیستم تعلیق
سیستم تعلیق ربات ها هم مثل ماشینها هست. همونجوری که یه ماشن یه سیستم تعلیق پر از قطعات داره پس رباتی که میسازیم هم نیاز به این قطعات داره که دونه به دونه یادش میگیریم.
فنر مارپیچی یا Coil Spring :
فنر مارپیچی رایجترین نوع فنر در سیستم تعلیقه. این فنر که از فولاد مقاوم ساخته میشه، مارپیچ پیچیده میشه و کارش جذب نیروهایی هست که از کف جاده به صورت عمودی به ربات وارد میشن. از طرف دیگه ارتفاع ربات رو تنظیم میکنه. همچنین باعث میشه که چرخها به طور مناسب با زمین تماس داشته باشن.(تصویر سمت راست)
کمک فنر یا Shock Absorbers :
کمک فنر یکی از اجزای اصلی سیستم تعلیق هست. همونطوری که از اسمش پیداست، کمک فنر جلوی حرکات ناگهانی و نوسان های فنر رو میگیره. فنرها زمان مواجه شدن با ناهمواریهای سطح جاده با سرعت باز و بسته میشن و همین باعث ایجاد جهش یا پریدن ربات میشه، کمک فنرها جلوی این حرکات رو میگیرن و کاری میکنن که چرخ ها همیشه به زمین بچسبه. از طرف دیگه، کمک فنر با کنترل نوسانهای فنرها باعث کنترلپذیری بهتر ربات، مخصوصاً سر پیچها میشه. پس اگه رباتی میسازین که سرعت بالایی داره، این قسمت رو شدیداً جدی بگیرین.(تصویر سمت راست)
بازوی کنترل یا Control Arm :
بازوی کنترل که بهش طَبَق هم میگن، یه قطعه فلزیه که به شکل حرف A یا L طراحی میشه. کار این قطعه اینه که چرخ ها رو به شاسی متصل کنه. این قطعه باعث میشه که چرخ ها در حال حرکت، راحت بتونن به سمت بالا و پایین جابجا بشن، بدون اینکه زاویه یا موقعیتشون نسبت به شاسی تغییر کنه و یا به عبارتی لاستیک از جاش دربیاد. یه بازوی متحرک برای کارایی بهتر و کمک کردن به فنر و کمک فنر از دوتا سری قطعه مهم استفاده میکنه که بهعشون بوش (Bushings) و سیبَک (Ball Joint) میگن.(تصویر سمت چپ)


توپی چرخ یا Wheel Hub :
توپی چرخ هم یکی دیگه ازقسمت های مهم سیستم تعلیقه که کارش اتصال چرخها به محور و سیستم تعلیقه. تو مجموعه توپی چرخ، از بلیرینگ و بعضی سنسور ها مثل ABS استفاده میشه. توپی این اجازه رو میده که در عین حال که چرخها به محور متصل هستن، بتونن بچرخن.(تصویر سمت راست)
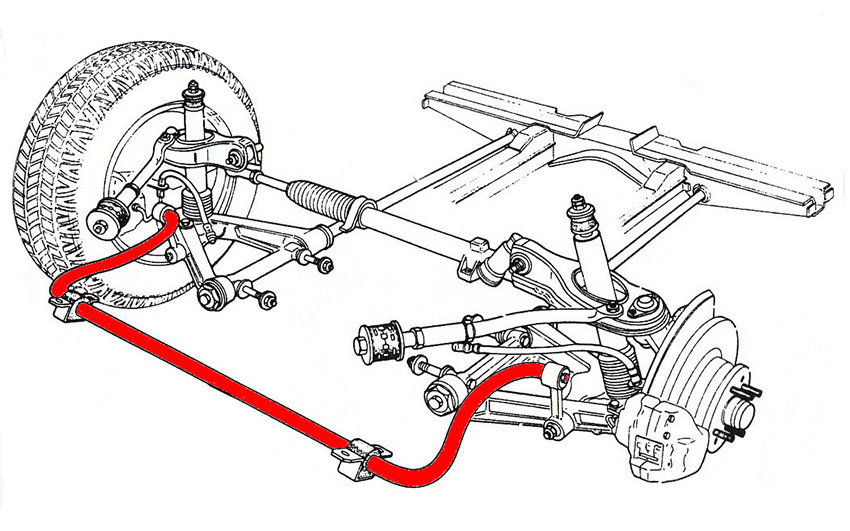
میل موجگیر یا Stabilizer Bar :
میل موج گیر که بهش Sway Bar یا Anti-Roll Bar هم میگن، قطعهای هست که نقش کلیدی تو حفظ تعادل و پایداری وسیله نقلیه موقع عبور از پیچها و سطوح ناهموار رو داره. میل موج گیر باعث میشه چرخ های یه محور یعنی محور جلو یا عقب هماهنگ تر عمل کنن. این کار با انتقال نیرو به سمت مخالف پیچیدن وسیله نقلیه انجام میشه. میل موج گیر خودش از قسمتهای میل تورشن (Torsion Bar) بازوهای اهرمی و بوش و سیبک تشکیل شده. به طور کلی این مورد هم صرفاً مناسب ربات های پر سرعت هست.(تصویر سمت چپ)

جمع بندی تا اینجای کار
سیستم تعلیق بسته به اینکه از چه نوعی باشه و چه تواناییهایی داشته باشه، اسامی مختلفی داره. این سیستم های تعلیق به نامهای مکفرسون (MacPherson)، تعلیق چند اتصالی (Multi-Link)، محور صلب (Solid Axle)، تعلیق میله پیچشی (Torsion Beam)، تعلیق بادی (Air Suspension) و تعلیق فعال (Active Suspension) خونده میشن که واقعاً هیچ جای صحبتی تو این مقاله نداره. چون مسیر ساخت ایده هامون رو طولانی و سخت میکنه. از طرفی هم چون قراره درباره رباتها صحبت کنیم، میریم ببینیم که یه ربات به چه سیستم تعلیقی نیاز داره. پس بریم سراغ بخش سوم.