:: به بخش چهارم خوش اومدین ::
تو این قسمت میخوام درباره یه موضوع ساده ولی با اهمیت فراوون صحبت کنم. تو رباتهایی که متحرک هستن، وجود یه ساختار مثل چرخ خیلی مهمه. انتخاب درست این موضوع میتونه روی کل ربات تاثیر بزاره و رباتمون رو با ارزش یا حتی بی ارزش کنه. برای همین حواستون باشه که از چه چرخی برای رباتتون استفاده میکنین. دنیای چرخها دنیای بزرگیه. تو این بخش میخوام درباره چرخهایی که مخصوص ربات هست صحبت کنم که البته بیشترشون اندازهای کوچیک دارن و خیلی به ندرت تو اندازههای بزرگ ساخته میشن. در نهایت هم چند نمونه از لاستیکهای بزرگتر رو هم بهتون معرفی میکنم تا اگه پروژتون بزرگه ازشون استفاده کنین.
انواع چرخ
تو دنیای رباتیک مثل دنیای ماشینهای واقعی از دو دسته اصلی چرخ استفاده میکنن. دسته اول، همون چرخ های عادی هستن که بهشون چرخ های مرسوم(تصویر سمت راست) هم میگن، تو اکثر ماشینها دیده میشه و از یه رینگ (حلقه فلزی مرکزی) و یه لاستیک (لایه لاستیکی دور رینگ) ساخته شده. دسته دوم که ظاهرش مثل چرخهایی نیست که هر روز میبینیم ولی یکی از خانواده بزرگ چرخها هستن، بهشون شنی (یا چرخ ممتد) میگن. اگه بخوام یه مثال از شنی(تصویر سمت چپ) بزنم، باید بگم شنی درواقع همون سیسستم متحرک تانکها و بعضی از لودرها و ماشینهای راهسازی هست. چرخ های مرسوم بیشتر قابل استفاده تو مسیرهای هموار هست و مواردی که خود ربات یا خودرو نسبتاً سبکه و لاستیکها میتونن وزن ربات یا خودرو رو تحمل کنن. اما در مورد شنی این موضوع متفاوته. ماشینآلات و رباتهایی که شنی دارن معمولاً تو مسیرهای ناهموار حرکت میکنن.از طرف دیگه نسبت وزن خودرو یا ربات به ابعادشون قابل تحمل برای چرخ های مرسوم نیست.

چرخهای تخصصی رباتیک
اولین چرخ مورد استفاده تو رباتیک شامل یه خانواده بزرگه. این خانواده بزرگ شامل چرخهایی هستن که بهشون چرخ استاندارد یا ثابت (Standard / Fixed Wheels) میگن. این چرخها همونطور که از اسمشون پیداست، ثابت هستن و درجه آزادی کمی دارن. این یعنی فقط میتونن تو جهت جلو و عقب حرکت کنن. این نوع چرخها سادهترین نوع چرخ تو دنیای رباتیکن و به صورت ثابت به شاسی ربات وصل میشن، بنابراین تو این نوع چرخ ها زاویه بین چرخها و بدنه تغییر نمیکنه و ثابته. برای اتصال هرکدوم از این چرخ ها باید از یه موتور مجزا استفاده کرد وگرنه حرکت ربات محدود و غیرقابل کنترل میشه. معمولاً از این چرخها تو ساختن رباتهای 4 چرخ و 2 چرخ استفاده میکنن.(تصویر سمت راست)
چرخ استاندارد مناسب پروژه من هست؟!
اگه میخواین پروژه هاتون رو با چرخ استاندارد یا ثابت بسازین، به این نکات توجه کنین. نصب و طراحی جای این چرخها روی ربات آسونه و فقط کافیه به مقدار چند سانتی متر بیشتر از قطر این چرخها، براشون جا بزارین. این چرخها ارزون قیمت هستن و به همین دلیل میشه از تعداد زیادتری از این چرخها تو پروژههای رباتیک استفاده کرد. این چرخها برای سطوح صاف و محیط های کنترل شده طراحی شدن و تو این محیطها عملکردی قابل پیشبینی دارن. در مقابل، به علت ثابت بودن این چرخها، نمیتونن مثل چرخهای خودروها به صورت جانبی حرکت کنن در نتیجه برای دور زدن باید فضای بیشتری در اختیار داشته باشن. این چرخ ها اصلاً برای محیط های ناهموار و لغزنده مناسب نیستن، چون تو اکثر مواقع فقط درجا میچرخن و اصلاً حرکت نمیکنن. اگه رباتتون آموزشی یا دانشآموزیه یا حتی کارهای سادهای رو تو یه محیط کوچیک و قابل کنترل انجام میده، این چرخ ها مناسب پروژه شماست. در مورد رباتهای تعقیب خط یا پروژههای ابتدایی آردوینو و رزبریپای هم این چرخ ها میتونن انتخاب خوبی باشن.
دومین نوع چرخی که تو رباتیک زیاد استفاده میشه چرخ هرزگرد یا کاستر (Caster Wheels) هست. این نوع چرخ قابلیت حرکت تو همه جهات رو داره و معمولاً پشت یا جلوی ربات نصب میشه. این چرخ بیشتر به عنوان چرخی برای حفظ تعادل ربات و پشتیبانی کننده از بقیه چرخ های اصلی استفاده میشه. با توانایی حرکت 360 درجه، چرخ هرزگرد باعث افزایش مانور پذیری ربات میشه. چرخ هرزگرد یا کاستر بسته به این که محور چرخ تو مرکز باشه یا بیرون تر از مرکز به دو نوع شاخک مرکزی(Centered) و شاخک خارج از مرکز(Off-Centered) تقسیم میشه. این چرخ از لحاظ کاربرد هم به سه نوع اصلی ساچمه ای(Ball Caster)، V شکل و D شکل تقسیم میشه.(تصویر سمت چپ)
چرخ هرزگرد مناسب پروژه من هست؟!
چرخ هرزگرد باعث میشه ربات روان تر حرکت کنه و بتونه فرمانپذیری بهتری داشته باشه. این چرخ باعث کم کردن اصطکاک ربات با سطح زمین میشه و همچنین تعادل ربات رو در حین چرخیدن حفظ کنه. این چرخ ارزون قیمته و بسیار راحت میشه نصبش کرد. اما در نظر داشته باشین که به این چرخ هیچ موتوری وصل نمیشه در نتیجه نمیتونه نیروی محرکه تولید کنه. به علت نصب ساده این چرخ به بدنه یا شاسی، تو سطوح ناهموار عملکرد ضعیفی داره و لرزش های سطحی رو به ربات منتقل میکنه و حتی ممکنه به خاطر کیفیتش دچار شکستگی بشه. اگه ربات دانشآموزی، مسابقهای و حتی تعقیب خط دارین یا رباتی میسازین که باید درجا بچرخه، میتونین از این نوع چرخ تو پروژتون استفاده کنین.


نوع سوم از چرخ هایی که میشه تو پروژههای رباتیک ازشون استفاده کرد، چرخ همه جهته(omni) هست. چرخ همه جهته(تصویر سمت راست) یکی از جذاب ترین و کاربردیترین چرخ ها تو رباتیکه. این چرخ همونجوری که از اسمش پیداست، به ربات قابلیت چرخش در همه جهات بدون اینکه نیازی به چرخش بدنه باشه رو میده. این چرخ برای رباتهایی که نیاز بع مانور بالا دارن خیلی کارآمده. درواقع این چرخ از تعداد زیادی چرخ کوچیک که روی یه چرخ اصلی و بزرگتر وصل شدن تشکیل میشه. این چرخهای کوچولوتر معمولاً به صورت عمودی بر محور چرخ بزرگتر نصب میشن. این کار باعث میشه چرخ علاوه بر حرکت اصلی خودش به جلو و عقب، بتونه به جهات دیگه هم حرکت کنه. این چرخ ها بسته به زاویه چرخ های کوچیک نسبت به محور چرخ اصلی، به دو نوع معمولی(زاویه 90 درجه) و نوع مکانوم(زاویه 45 درجه) تقسیم میشن.
چرخ همه جهته مناسب پروژه من هست؟!
اگه ربات نیاز به مانور زیاد توی یه محدوده کوچیک داره مثلاً، میخواد که دور درجا بزنه یا بخواد توی یه جای کوچیک پارک کنه یا حتی تو مسیرهای پیچیده حرکت کنه، این چرخ مناسب کار شماست. این چرخها روی سطوح صاف بهتر عمل میکنن و کمتر با سطح زمین اصطکاک دارن. به طور کلی اگه رباتتون صنعتی یا امدادگر هست تو انتخاب این چرخ تردید نکنین.
چرخ بعدی چرخ مکانوم(Mecanum Wheel) هست. همونطور که گفتم چرخ مکانوم(تصویر سمت چپ) یکی از اعضای خانواده چرخهای همه جهته هست. این چرخ، یکی از پیشرفتهترین و جذابترین چرخها تو دنیای رباتیکه که به ربات امکان حرکت تو تمام جهات رو میده. این چرخها از چندتا غلطک زاویه دار که روی چرخ اصلی سوار میشن تشکیل شدن که با چرخ اصلی زاویه 45 درجه ای میسازن. این غلطکها باعث میشن که چرخ علاوه بر توانایی حرکت رو به جلو و عقب، بتونه به صورت چرخشی هم حرکت کنه. از اونجایی که هرکدوم از این چرخها باید تو جهت خاصی بچرخن تا یه حرکت ترکیبی ایجاد بشه، بنابراین معمولاً به صورت 4 تایی روی ربات نصب میشن. این چرخ یه تفاوت اساسی با چرخ همه جهته داره و اون هم توانایی حرکت موربه که کمک میکنه ربات بتونه به صورت کج هم حرکت کنه.
چرخ مکانوم مناسب پروژه من هست؟!
اگه پروژتون ساخت یه ربات صنعتی حرفهای و یا یه ربات لجستیک(رباتهایی که از طریق یه سرور به خم متصل میشن و با هم هماهنگن و کارایی مثل جابجایی کالا، ذخیرهسازی، مرتبسازی و تحویل رو بهصورت خودکار و دقیق انجام میدن) هست، یا اگه دارین یه لیفتراک صنعتی میسازین، میتونین از این چرخ استفاده کنین. برای رباتهای امدادگری که تو مسیرهای پیچیده حرکت میکنن و یا خودروهای خودرانی که کاراشون تو یه محیط بسته هست هم، این چرخ پیشنهاد خوبیه. در نهایت این نکات رو در نظر داشته باشین: چون این چرخها بری حرکت دقیق طراحی شدن، باید با برنامهنویسی، الگوریتم های ماتریسی و کنترلر الکترونیکی به صورت حرفهای تنظیم بشن.


چرخ دیگه ای که تو رباتیک استفاده میشه، چرخ توپی(Ball Caster Wheel) هست که عضوی از خانواده چرخهای هرزگرده. چرخ توپی(تصویر سمت راست) ساده، اما در عین حال یکی از کاربردی ترین چرخهای رباتیکه. این چرخ از یه توپ کروی تشکیل شده که توی یه محفظه نگهدارنده قرار داره. این توپ میتونه به تمام جهات بچرخه، بدون اینکه بخشی از انرژی منبع تغذیه یا باتری رو مصرف کنه. توپ مرکزی معمولاً از جنس فلز یا پلاستیک سخت ساخته میشه. محفظه نگهدارنده توپ ضمن نگهداشتن توپ، باعث ایجاد حرکت آزادانه توپ میشه. چرخ توپی یه پایه اتصال هم داره که کمک میکنه این چرخ به راحتی به شاسی ربات متصل بشه. این چرخ بیشتر به عنوان چرخ کمکی و حفظکننده تعادل تو رباتهای دو چرخ و سه چرخ کاربرد داره. همچنین تو رباتهای سبک مثل رباتهای تعقیبخط، رباتهای فوتبالیست یا آموزشی هم استفاده میشه.
چرخ توپی مناسب پروژه من هست؟
اگه تو استفاده از چرخهای اصلی یا میزان انرژی منبع تغذیه محدودیت دارین، میتونین از این چرخ به عنوان یه چرخ کمکی استفاده کنین. این چرخ ارزون قیمت و سبک، راحت نصب میشه و کمک میکنه رباتتون بتونه تو تمام جهات بچرخه .اگه محیط کارتون مثل میز مسابقات صافه، خیلی راحت میشه از این چرخ استفاده کرد. اما در مقابل این مزیتها سبک بودن این چرخ باعث میشه نتونه وزن زیادی رو تحمل کنه بنابراین وزن ربات باید روی چرخ های اصلی باشه. اگه رباتتون تو محیطهای ناهمموار یا محیطی که فرش یا چمن داره، کار میکنه، این چرخ به راحتی تو این سطوح گیر میکنه. نکته اخر هم اینکه چون این چرخ از خانواده چرخهای هرزگرد هست و به موتور وصل نمیشه، بنابراین نمیتونه به شما نیروی محرکه بده.
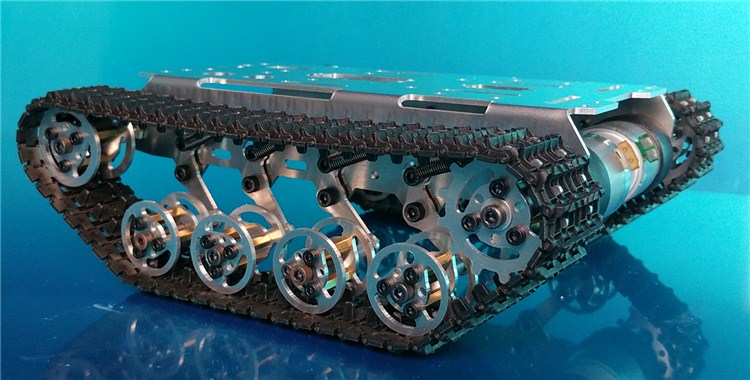
یه چرخ دیگه وجود داره که ظاهرش اصلاً شبیه به چرخهایی که میشناسیم نیست. به این چرخها شنی (Tracked Wheel) میگن. احتمالاً این چرخها رو توی تانکها یا بعضی از بولدوزرها(بیل مکانیکی) دیده باشین. درواقع شنی(تصویر سمت چپ)، زنجیرهایی متصل به هم هستن که دور یه سری سازههای گرد و چرخ مانند میچرخن. این چرخها مزیتهای زیای دارن. از جمله این مزیتها، استفادشون تو ساخت رباتهایی هست که روی سطوح ناهموار و نرم مثل شن، گل و برف حرکت میکنن. چون سطح تماس با زمین ربات با استفاده از این چرخها بیشتر میشه، این چرخها رو تو رباتهای با وزن زیاد هم استفاده میکنن. از طرف دیگه به علت ایجاد چسبندگی قوی به زمین، ربات پایداری و تعادل بهتری داره و رو سطوح صیقلی و یخی سر نمیخوره. شنی در واقع یه چرخ یکدست با طول زیاده، که این هم رو تعادل و پایداریش موثره.

یه راه حل برای پروژه
تا الان یه عالمه چرخ رو دیدیم که کلی ویژگی های خوب داشتن. اما یه نکته مهم و مشترک بین همشون وجود داره. همه این چرخ ها کوچیکن. پس حالا چیکار کنیم؟ من یه راه حل برای پروژه خودم پیدا کردم. میتونین از چرخ دوچرخه که تو سایزهای 12 به بالا هست(من خودم سایز 12 استفاده کردم) استفاده کنین. این چرخ حدوداً 30 سانته. برای به صرفه در اومدن هم میتونین از لاستیک تیوبلس(تو پر) دوچرخه که حالت فومی داره استفاده کنین. مورد دیگه چرخ فرغون هست که پهنای بیشتری داره ولی به لحاظ قیمتی هم گرون تره. هردو تا چرخ رو باید با یه میله به ربات وصل کنین. اینکه نحوه نصب چجوری باشه و یا چطور موتور رو بهش وصل کنین رو تو دوره اختراعات براتون میزارم.